CubicVR製作者のための
*** ノーダルポイント誤差論 ***
English version
岸本陸一 Rikuichi Kishimoto http://www.ksmt.com 
2008.10.31 初版 10D日誌
2009.1.31 10D日誌から独立
2009.9.22 "6 巨大化"追加
ksmt.comの10D日誌において2008.10.29 から 2008.10.33まで5回に渡って ”ノーダルポイント誤差論” を書きました。自分で言うのもなんですが、なかなか良くまとまっているので、多くの方に読んでもらえるよう独立させました。こちらは日本語版ですが、別途英語版も作りました。
ノーダルポイント誤差論 目次
0. 前置き
1. 基本編 1.1直線があるか 1.2近接かどうか 1.3レタッチするかどうか
2. 方向性
3. 数値例
4. 応用編
5. 積極策
6 巨大化
0. 前置き
先日QTVR Diaryの二宮さん主催の飲み会でパノラマ写真関係のクリエーターの方と大勢お会いしました。パノラマ写真を扱うプロの写真家も数人来ておられました。私を含めて初対面の方が多いようで、話題は撮影機材、あるいは撮影方法に関するものが多かったです。カメラやレンズの方はだいたいみんな良く知っているので、話題の中心はやはりパノラマ雲台あるいはローテータと呼ばれるもの。つまり、いかにしてノーダルポイントを空間的に固定してカメラを回転するかという話題です。ノーダルポイントが固定されていると、写真がきれいにつながるのです。特に上下左右360度見ることのできるCubicVRを製作する時には、撮影時にノーダルポイントどうするか、が重要になります。ノーダルポイントを1ミリもずらさすにカメラを回転できればベストなのですが、実際にはそんなにうまく行きません。まあ、ちょっとぐらいずれてもいいわけですが、じゃぁ、どれくらいずれてもいいのか? というのがノーダルポイント誤差論です。
1. 基本編
私も基本的にはノーダルポイントを固定してパノラマ撮影しています。だたし、いくら頑丈な三脚を使っても、1ミクロンもずらさないということはできません。すなわち、ノーダルポイントのずれが許容誤差範囲内に収まっているかどうかが重要になります。この許容誤差範囲は撮影の目的によって、あるいはスティッチやレタッチの方法によって決まります。たとえば、歴史的建造物の狭い室内を記録を残すのであれば、1ミリくらいかもしれません。都市の路上であれば、10センチくらいかもしれません。東京タワーの展望台から遠方を写した時には、50メートルくらいずれていても問題ありませんでした。私の経験上では、次のような要素によってノーダルポイントの許容誤差範囲が決まると思います。
1.1 直線があるかどうか。
直線が曲がっていると、ものすごく目立ちます。たとえば、部屋の壁と天井の境目の直線がまっすぐつなげるかは非常に重要です。ビルのフロアのタイルの目地が直線かどうかは気になってしかたがありません。従って、許容誤差範囲は非常に小さくなります。一方、人工物が全くない森の中では、直線はほとんどありませんので、木の枝が多少曲がっても特に問題ありません。足もとの草むらがどうだったか知っている人はいません。従って、許容誤差範囲は大きくなります。
1.2 近接撮影かどうか。
カメラと被写体の距離によって許容誤差範囲内は変わります。近接撮影の場合には許容誤差範囲も小さくなります。例えば10センチ(100mm)前方の物を近接撮影する場合の許容誤差範囲は1ミリくらいでしょう。一方、100メートル先の風景を撮影するのであれば、10センチや20センチの誤差は許されると思います。東京タワーの展望台からの撮影の時にはノーダルポイントが50メートルほどずれていましたが、特に問題なくつながりました。
1.3 Photoshopでレイヤーを使ったレタッチをするかどうか。
これには2つの意味があります。
1.3.1 第一には、つながっていないものを、どうやってごまかすかという意味です。レイヤーを使って繋ぎ目を目立たなくすることができれば、許容誤差範囲は大きくなります。ただし、これをやるとある種の嘘が入ることも確かです。従って、製作者が方針として決めるべきことがらです。
1.3.2 第二には、動いているものをどうやって取り扱うかという意味です。レイヤーを使って編集すれば、つなぎ目で動いているものが中途半端に切れることを防ぐことができます。レイヤーを使って編集しない場合は、繋ぎ目に動いているものがない状態で撮影するか、極端な長時間露光で動いているものを消すか、などの対策が必要です。
1.3.3 1.3.1の処理を1.3.2の技術を使って行うこともできます。つなぎで問題になる部分に動くものをレタッチ時に入れるのです。例えばビルの壁がつながらない場合、そこに歩行者を入れます。歩行者はだいたい誰でも魅力的なので、つなぎの問題は一気にパノラマの魅力へと変化します。これもやはり製作者の方針として決めることがらです。
2. 方向性
ノーダルポイントは三次元空間の中の1点として扱いますので、X, Y, Zの3値で表現することができます。上下左右360度を撮影するキービックVRの場合、上下左右の方向によって重要性が異なるということは原則的にはありません。スティッチングのソフトウェアによってはカメラを水平に回転させなければならない場合もあるようですが、少なくとも私が使っているPTGuiにおいてはそのような制限はありません。水平がいくら狂っていても、簡単に修正することができます。そういう意味では、キュービックVRに方向性はない、と言えます。
それでは、ノーダルポイントのX, Y, Z値に重要性の違い、すなわち方向性はあるのでしょうか? 私の経験では、明らかに重要性の違い、すなわち方向性があります。これは数学的なものではなく、我々人類がが長年平らな地面に直立して暮らしてきたせいです。というのは真っ赤な嘘で、昨日3.3で述べた、つなぎの部分に通行人を貼り付けてごまかす、という時の話です。通行人でなくても、犬でも豚でも車でも植木鉢でも何でもかまいません。これを仮にワッペンと呼びます。ワッペンを使わないのであれば、撮影時に方向性を意識する必要はなく、ひたすらノーダルポイントを固定すれば良いです。
ワッペンにおいて、Y軸、すなわちカメラの高さは非常に重要です。唯一Y軸だけが同じであれば良い、と言ってもよいくらい重要です。たとえば、地面すれすれとか、膝の位置とか、目の位置とか、万歳の位置とかで統一すればいいです。これが大きく狂っていると、自然なキュービックVRにはなりません。わざと不自然にする手もありますが、相当高いセンスが要求されます。
ワッペンにおいて、Z軸、すなわち被写体とカメラの距離は、多少気にする必要があります。距離が近ければ被写体は大きく写り、遠ければ小さく写ります。また、遠くの物は近くのものと重なった場合隠れてしまいます。つまり、Z値はPhotoshopのレイヤーの順序に相当します。また、ワッペンを単純に縮小すれば、遠方に遠ざけることができますし、ワッペンを拡大すれば近づけることができます。ある程度以上遠方(たとえば10m)においては、Zは後で調整できますので、全く気にしなくてもいいです。私は8mm円周魚眼で撮影したVRに300mm望遠レンズで撮影したワッペンを貼るようなことをたまに行いますが、全く問題ありません。近距離においては円周魚眼レンズの鼻でか写真のような効果が大きくなりますので、Z値を実際に合わせて撮影あるいは編集しましょう。
ワッペンにおいて、X軸すなわち横方向への平行移動はノーダルポイントとは関係がありません。任意のX座標を選ぶことができます。もちろん、できるだけ光線状態が似たX位置で撮影するのがベストですが、私は気にせず全部順光、すなわちストロボ直射でワッペンを撮影しています。
ここまで来ると、もうお分かりだと思いますが、普通のキュービックVRに少しワッペンを貼ると、ちょっと楽しくなるということです。たとえば、無人の井戸のキュービックVRを撮影した帰り道に、井戸とは関係ないところで地元のおばさん達が立ち話をしていたら、お願いしてその場で撮影させてもらえば良いのです。これを合成して“井戸端会議”という作品の完成です。このような合成を使うか使わないかは、もちろん製作者の判断になります。おばさん達に実際に井戸までご足労願うか、それともPhotoshop上の移動ですませるか。
3. 数値例
それでは、実際の撮影におけるノーダルポイントの誤差の例を示したいと思います。これは理論的なものではなく、私の経験から得た数値です。本来ならば、撮影時に守るべき許容誤差範囲を示したいところですが、実際には撮影状況や(空中から撮影したいが、実際にはビルの窓からしか撮影できない)、撮影機材(三脚や一脚は使えず、手持ち撮影)の制約である場合が多いです。このことから、許容誤差範囲には2種類の考え方あると言えます。
許容誤差範囲1: 想定する許容誤差範囲(たとえば三脚使用で誤差1センチ)が満たされる条件でのみパノラマVRの撮影を行う。それ以外では撮影を行わない。
許容誤差範囲2: ひどい誤差(たとえば誤差100メートル)であっても、とりあえず撮影を行う。これをどうにかしてスティッチする手段を後で考える。
実際には、ほとんどの撮影者が上記1に該当するのでないかと思います。私の場合はほとんど上記2なのですが、多くの場合、1と2の間をさまようことになります。以下に示すノーダルポイント許容誤差範囲の例が、上記1から2に向けて一歩を踏み出そうとする方の参考になればなぁ思います。
### ノーダルポイント許容誤差範囲の例 ksmt.comの経験値 ###
1cm - レンズの先10cm程度の近接撮影。
1cm - 室内における精密な撮影。
1cm - 直線的なビルの多い都市での精密な撮影。
5cm - 一般の屋外での撮影。自動スティッチで手修正なし。
5cm - 室内における昼間の一般的な撮影。
20cm - 一般の屋外での撮影。手修正あり。
50cm - ポールパノラマ
50cm - 人工物のない屋外の自然環境。手修正あり。
50cm - 夜間の暗い室内。宴会など。手修正あり。
50cm - 夜間の明るい屋外。
1m - 夜間の暗い屋外。
20m - 夜間の低いビルの屋上。
50m - 高いビル。東京タワーの展望台など。
X方向∞ - 昨日書いた”ワッペン”使用時。
ここから共通項を見つけて少し一般化すると次のようになります。
3.1 被写体までの距離とノーダルポイント許容誤差はほぼ比例する。仮に誤差1%とすると、10cmの近接撮影で1mm,
10kmの遠景撮影であれば100m。
3.2 床と天井の処理がキーとなる。夜間の真っ暗な床、昼間の真っ青な天井、小物撮影の真っ白なテーブルなどでは許容誤差範囲が広がる
3.3 Photoshopなどによる手修正や、ワッペン貼り付けなどの修正を行えば、許容誤差範囲が広がる。
4. 応用編
かつて、ニュートンはガラスに屈折率の分散がある限り、レンズの色収差は決して除去できないと考えました。しかし、ニュートンの死後、分散のある凸レンズと、より高分散の凹レンズを組み合わせることにより色消しレンズが出現します。後で考えれば簡単なことなのですが、ニュートンはガラスの分散に気を取られて気付かなかったようです。同じように、ノーダルポイントの誤差がどうしても避けられないのであれば、それを打ち消す方法を考えてみましょう。
誤差を打ち消した実例:

東京タワーの地上150mにところに大展望台があります。ここの窓はわずかに下向きに傾いており、景色が良く見えます。8方向の窓に円周魚眼レンズをくっつけて撮影すると、わずかに下向きの撮影となります。大展望台というくらいなので、ノーダルポイントからは50mほどずれますが、スティッチしてみると、これが案外うまくつながるのです。もちろん、昼間だとつなぎ目のアラが目立ちますが、夜間なら真黒なところでつないでしまえば十分ごまかせます。
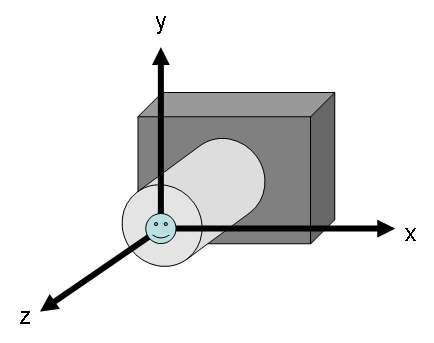
ところが、東京タワー以外のビルではこんなにうまくいかないのです。普通のまっすぐなビルでは、いくらガラスにレンズをくっつけても真下は写らないので当たり前なのですが。ここから思いついたのが、Extended
Nodal Point (拡張ノーダルポイント)という概念です。本当か嘘か分かりませんが、適当に上のような説明図を書いてみると、説得力があるような、ないような。各写真においてレンズの先端と接する面を上下に拡張し、これが交わる点をExtended
Nodal Point (拡張ノーダルポイント)と名付けました。東京タワーの撮影における主題は、上空から見た東京タワーです。すなわち真下だけしっかり写して、他は適当にごまかそうという作戦です。展望台における50メートルの誤差を、カメラを少し下向きで撮影することにより打ち消し、主題となる地面付近において拡張ノーダルポイントを一点に集中させる。その代り天井部分の誤差が大きくなるが、どうせ真っ暗な夜空なので簡単にごまかせる。というアイデアです。
自分で言うのもなんですが、この説の不審な点は、カメラを下向けた効果は全くないかもしれないという点です。なにしろ円周魚眼レンズですので、どっちを向いていようが、ほとんど関係ないような気がします。地上5mのポールパノラマでも結構ごまかしが利くので、地上150mの大展望台ならノーダルポイントの誤差なんて関係ない、と言ってしまうと理論っぽくないので、あえてこのような書き方をしてみました。まあ、適当にいろいろやってみてください。
この例ではノーダルポイントよりカメラが前に出ていますが、逆にカメラを後ろに下げても似たようなことができます。吹き抜けのあるビルで、四方から撮影すると、あたかも吹き抜けの中の空中から撮影したかのようなパノラマVRが作成できます。でも、三角ビルはたいへんなのであまりおすすめできません。
5. 積極策
ノーダルポイントがずれないようにいくら努力しても、どうしてもずれてしまうので、状況によってある程度の誤差は認めましょう。というのが今までの話だったわけです。これは消極的な態度なので、どうも気に入りません。もっと積極的にノーダルポイントをはずして手品のようなパノラマを作れないものか、というのが今日のお話です。
美しい風景の手前に電柱があって、邪魔になってしょうがない時、積極的にノーダルポイントはずしを使って、電柱を消すことができます。ノーダルポイントが出ていると、電柱の後ろの景色はどの写真にも写っていませんので、電柱を消すとパノラマに穴があいてしまいます。ノーダルポイントをちょっとはずせば、電柱の後ろの風景が写せます。電柱は近くにあるのでノーダルポイントのずれの影響が大きいのですが、背後の風景は遠くにあるので影響をほとんど受けません。
過去にたった一回だけ積極的にノーダルポイントはずしを使ったことがありますので、その例を使って説明します。2005年9月19日の日誌を見ると、大阪の通天閣の展望台(一番下までスクロールしてください)のQTVRにおいて、窓ガラス清掃用の手すりを消しています。カメラから手すりまでは約2m、遠景までは100m以上離れているので、うまく手すりが消せました。撮影枚数を2倍にして、Photoshopでちょっといじるだけで、この積極策を簡単に使うことができます。

ノーダルポイント誤差論は、ひとまずこれで終了としたいと思います。
6 巨大化
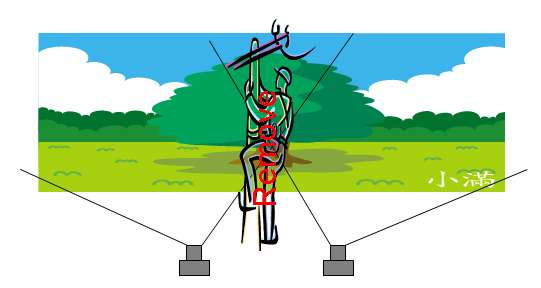
World Wide Panorama 909 "Performing Arts"投稿用に"Harajuku
Street Art"(原宿路上芸術)という360°パノラマを制作しました。この中でノーダル・ポイントをわざとずらして、主役を巨大化し強調するという新しい手法を試してみました。文章では分かりずらいので、イラストを使って説明します。

左は身長150cm体重50Kgの普通ゴルファー、右は身長4.5m体重1.3トンの巨大ゴルファーです。普通ゴルファーの場合カメラは胸のあたり、巨大ゴルファーの場合カメラはスネのあたりになります。

縮尺を変えて作図すると、このようになります。すなわち、カメラの高さをわずか1mほど下げると、身長が3倍になったのと同じ効果が得られるはずです。合成時に少し調整する必要がありますが、割と簡単です。身長が3倍になると、パターでも軽く300ヤードは転がるはず。
ご意見、ご質問などがありましたらksmt.com掲示板 またはまでお知らせ下さい。